1. Space Logistics
Multi-Sensor Tasking for Ground-Based Telescopes via Job-Shop Scheduling Problem
The short-term telescope tasking problem consists of rapidly constructing a sensor-tasking schedule for observing resident space objects (RSO) passing overhead. Due to the short-term prediction horizon necessitated by this application, motion of RSOs can be assumed to be exactly known, making the prolbem deterministic. We derive a job-shop-scheduling problem for both single and multi-telescope sensor-tasking scenarios.
Related publication: Y. Shimane, N. Gollins, and K. Ho, “Multi-Sensor Tasking for Ground-Based Space Situational Awareness via Job-Shop Scheduling Problem,” in AAS/AIAA Space Flight Mechanics Meeting, 2025. Available: Conference server

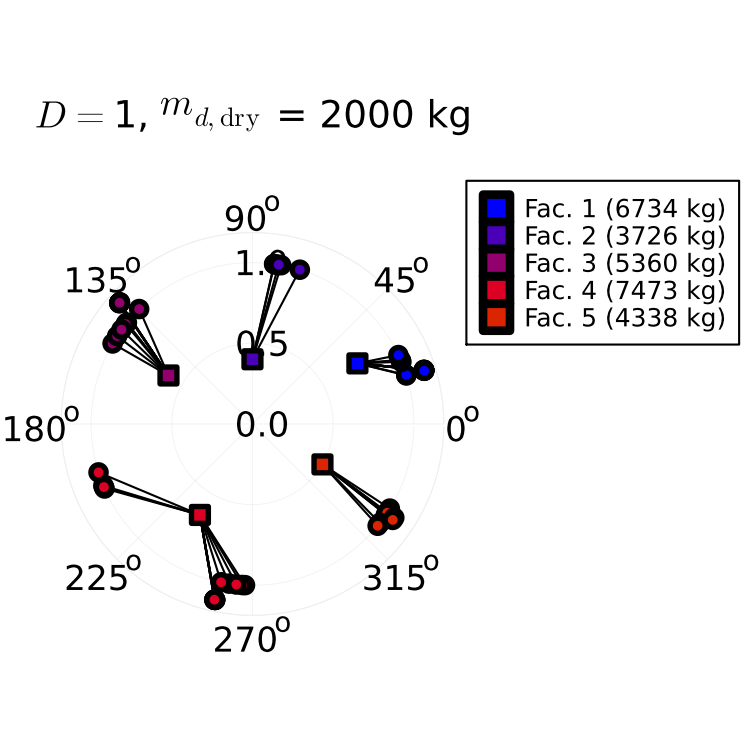
Cislunar Space Situational Awareness Constellation Design and Planning with Facility Location Problem
This work formulates a novel time-expanded p-Median problem to design space-based observer constellations for Cislunar Space Situational Awareness (CSSA). We also derive a Lagrangean relaxation-based algorithm to rapidly obtain near-optimal solutions.
Related publication: Y. Shimane, K. Tomita, and K. Ho, “Cislunar Space Situational Awareness Constellation Design and Planning with Facility Location Problem,” J. Spacecr. Rockets, pp. 1–23, Jun. 2025, doi: 10.2514/1.A36361
Facility Location Problem for On-Orbit Servicing Depot
This work formulates a facility location problem for on-orbit servicing depot in Medium Earth Orbit (MEO), considering low-thrust round-trip servicers.
Related publication: Y. Shimane, N. Gollins, and K. Ho, “Orbital Facility Location Problem for Satellite Constellation Servicing Depots,” J. Spacecr. Rockets, pp. 1–18, Mar. 2024, doi: 10.2514/1.A35691. https://arc.aiaa.org/doi/full/10.2514/1.A35691
2. Guidance, Navigation, and Control (GNC)
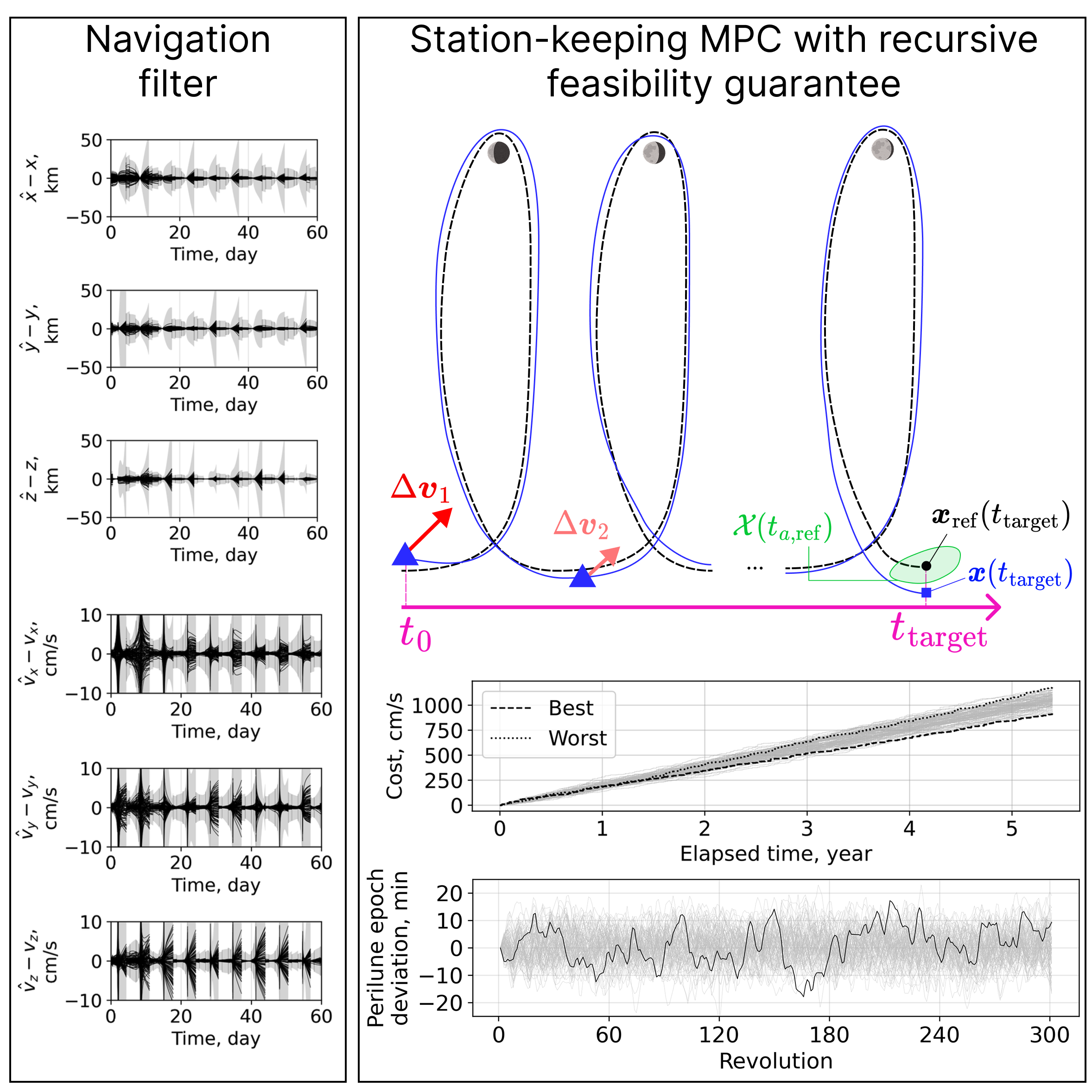
MPC Station-Keeping on Libration Point Orbits
With: Mitsubishi Electric Research Laboratories
We develop a model predictive control (MPC) policy for station-keeping (SK) on a Near-Rectilinear Halo Orbit (NRHO). The proposed policy achieves full-state tracking of a reference NRHO via a two-maneuver control horizon placed one revolution apart. Our method abides by the typical mission requirement that at most one maneuver is used for SK during each NRHO revolution. Simultaneously, the policy has sufficient controllability for full-state tracking, making it immune to phase deviation issues in the along-track direction of the reference NRHO, a common drawback of existing SK methods with a single maneuver per revolution. We report numerical simulations with a navigation filter to demonstrate the MPC’s performance with output feedback. Our approach successfully maintains the spacecraft’s motion in the vicinity of the reference in both space and phase, with tighter tracking than state-of-the-art SK methods and comparable delta-V performance.
Related publication: Y. Shimane, S. Di Cairano, K. Ho, and A. Weiss, “Output-Feedback Full-State Targeting Model Predictive Control for Station-Keeping on Near-Rectilinear Halo Orbits,” 2025, [Online]. Available: http://arxiv.org/abs/2502.05013

Autonomous Optical Navigation on Near-Rectilinear Halo Orbit
With: Mitsubishi Electric Research Laboratories
Autonomous navigation capability in cislunar space is critical for the safe operation of both uncrewed and crewed spacecraft. This project explores the use of horizon-based optical navigation to autonomously navigate and conduct station-keeping for a spacecraft on the 9:2 Near-Rectilinear Halo Orbit (NRHO) in the full-ephemeris model.
Related publication: Y. Shimane, P. Miraldo, K. Berntorp, M. Greiff, P. Elango, and A. Weiss, “High-Fidelity Simulation of Horizon-Based Optical Navigation with Open-Source Software,” in 74th International Astronautical Congress, 2023. Available: https://www.merl.com/publications/docs/TR2023-128.pdf
3. Astrodynamics and Trajectory Design
12th Global Trajectory Optimisation Competition
With: ESA ACT&Friends
We competed in the 12th GTOC competition and ended up 4th place overall!
Related publication: D. Izzo et al., “Asteroid mining: ACT&Friends’ results for the GTOC12 problems,” Astrodynamics, 2025. 10.1007/s42064-024-0204-x
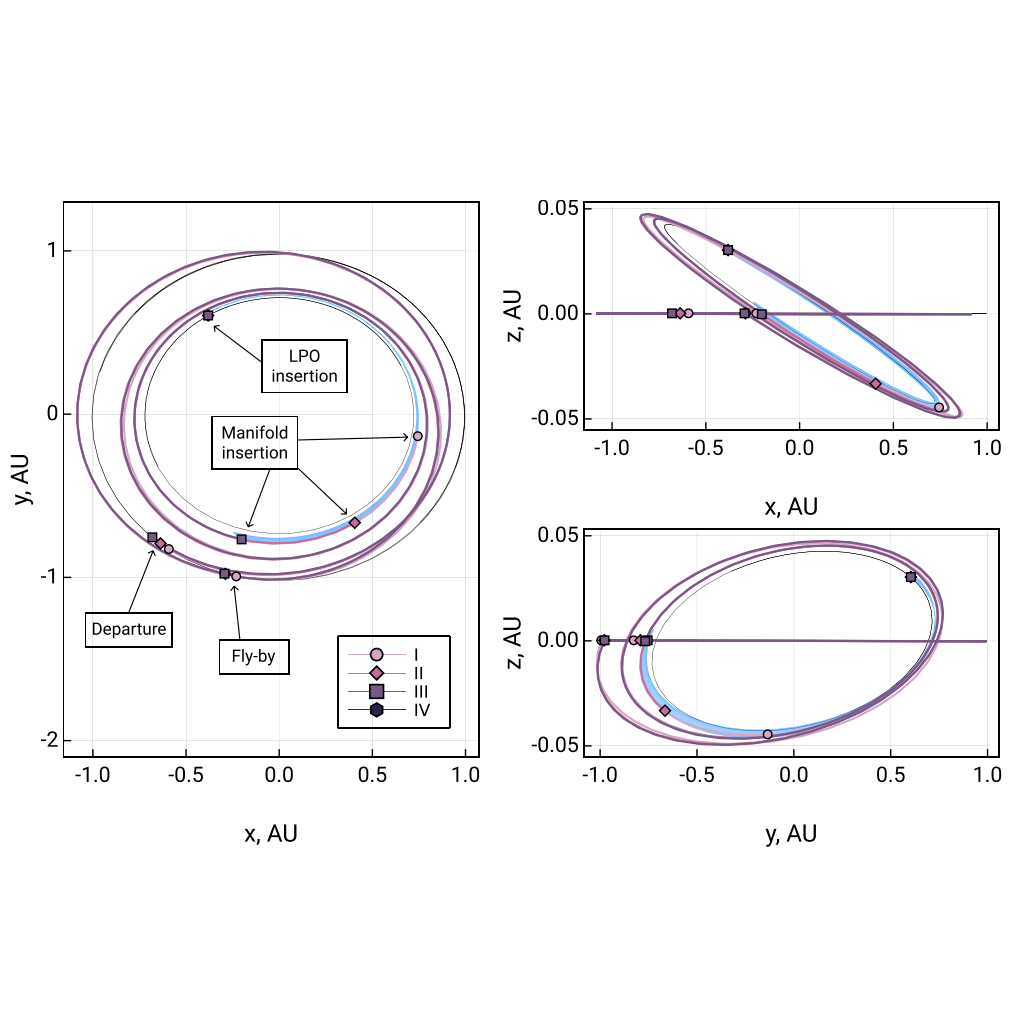
Gravity-Assist Low-Thrust Trajectory Design
The combined use of gravity assist, low-thrust propulsion, and manifold capture for interplanetary transfers is studied. This work makes use of the Sims-Flanagan transcription, incorporating parametrization of arrival to a manifold Poincaré section instead of a celestial body.
Related publication: Y. Shimane and K. Ho, “Gravity‑Assist Low‑Thrust Inter‑System Trajectory Design with Manifold Captures,” J. Astronaut. Sci., 2022. https://doi.org/10.1007/s40295-022-00319-x
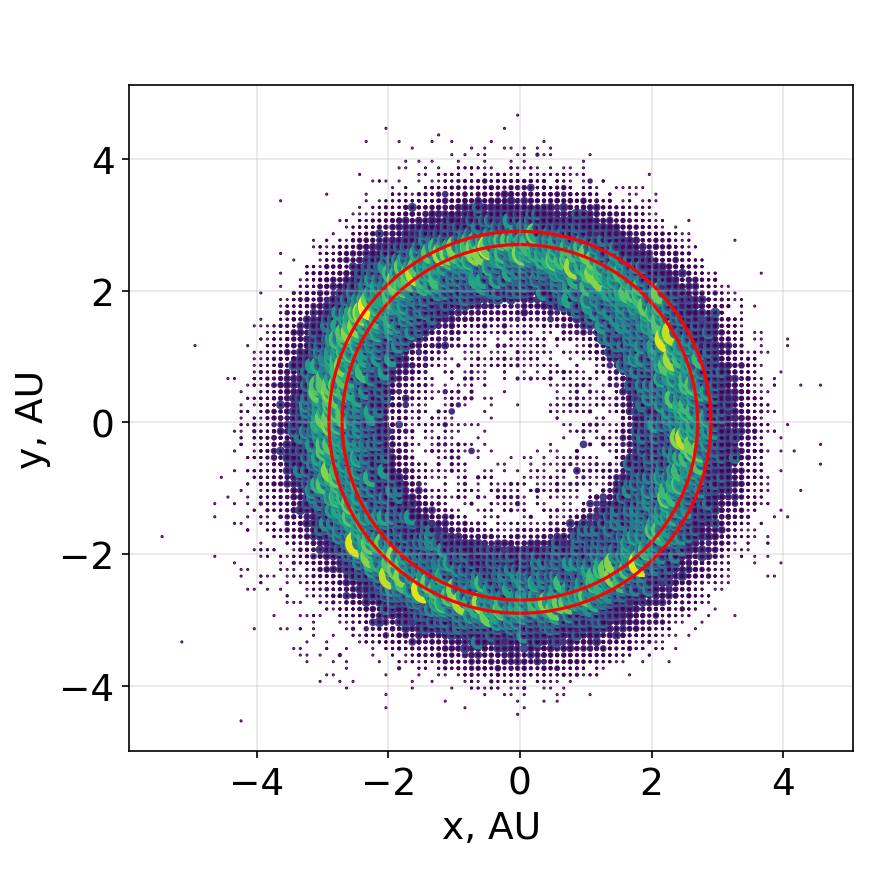
11th Global Trajectory Optimisation Competition
With: ESA ACT&Friends
We competed in the 11th GTOC competition and ended up 2nd place overall!
Related publication: M. Märtens, D. Izzo, E. Blazquez, M. von Looz, P. Gomez, A. Mergy, G. Accdiarini, C.H. Yam, J. Hernando-Ayuso, Y. Shimane, “The fellowship of the Dyson ring: ACT&Friends’ results and methods for GTOC 11,” Acta Astronaut., no. February, 2022. https://doi.org/10.1016/j.actaastro.2022.06.025